-
×
 Raspberry Pi 3 Model B+ (Made in the UK)
1 × 1.310.000 ₫
Raspberry Pi 3 Model B+ (Made in the UK)
1 × 1.310.000 ₫
 Raspberry Pi 3 Model B+ (Made in the UK)
Raspberry Pi 3 Model B+ (Made in the UK) Lập trình Raspberry Pi, Thủ thuật Raspberry Pi
Máy scan tài liệu bằng Raspberry Pi và Camera
Bạn có một chiếc Raspberry Pi và camera module? Hãy biến chúng thành một chiếc máy scan tài liệu mini có giao diện trực quan, khả năng crop viền tự động, và xem trước ảnh trước khi lưu mà không cần phần cứng phức tạp. Máy scan tài liệu này cho phép xem trước hình ảnh trực tiếp từ camera, giúp căn khung dễ dàng. Chỉ với một nút bấm, bạn có thể chụp tài liệu, ảnh sẽ được xử lý bằng OpenCV để tự động cắt viền và hiển thị rõ nét. Người dùng có thể xem lại ảnh ngay trên giao diện và ảnh được lưu dưới dạng JPG với tên file kèm thời gian, tiện cho việc sắp xếp và tra cứu.
Linh kiện sử dụng
Giảm 7%


Raspberry Pi
Giá từ: 1.720.000 ₫
Sản phẩm này có nhiều biến thể. Các tùy chọn có thể được chọn trên trang sản phẩm
Giảm 14%


Phụ kiện Raspberry Pi 4
Giá gốc là: 350.000 ₫.300.000 ₫Giá hiện tại là: 300.000 ₫.

Camera Raspberry Pi
Raspberry Pi Camera Module V3 – 12MP – Ống kính Lấy nét Tự động
Giá từ: 890.000 ₫
Sản phẩm này có nhiều biến thể. Các tùy chọn có thể được chọn trên trang sản phẩm

Ngoài ra, bạn có thể chuẩn bị thêm màn hình, bàn phím và chuột để sử dụng Pi hoặc là sử dụng Pi trên laptop cá nhân thông qua VNC Viewer.
Giao diện người dùng
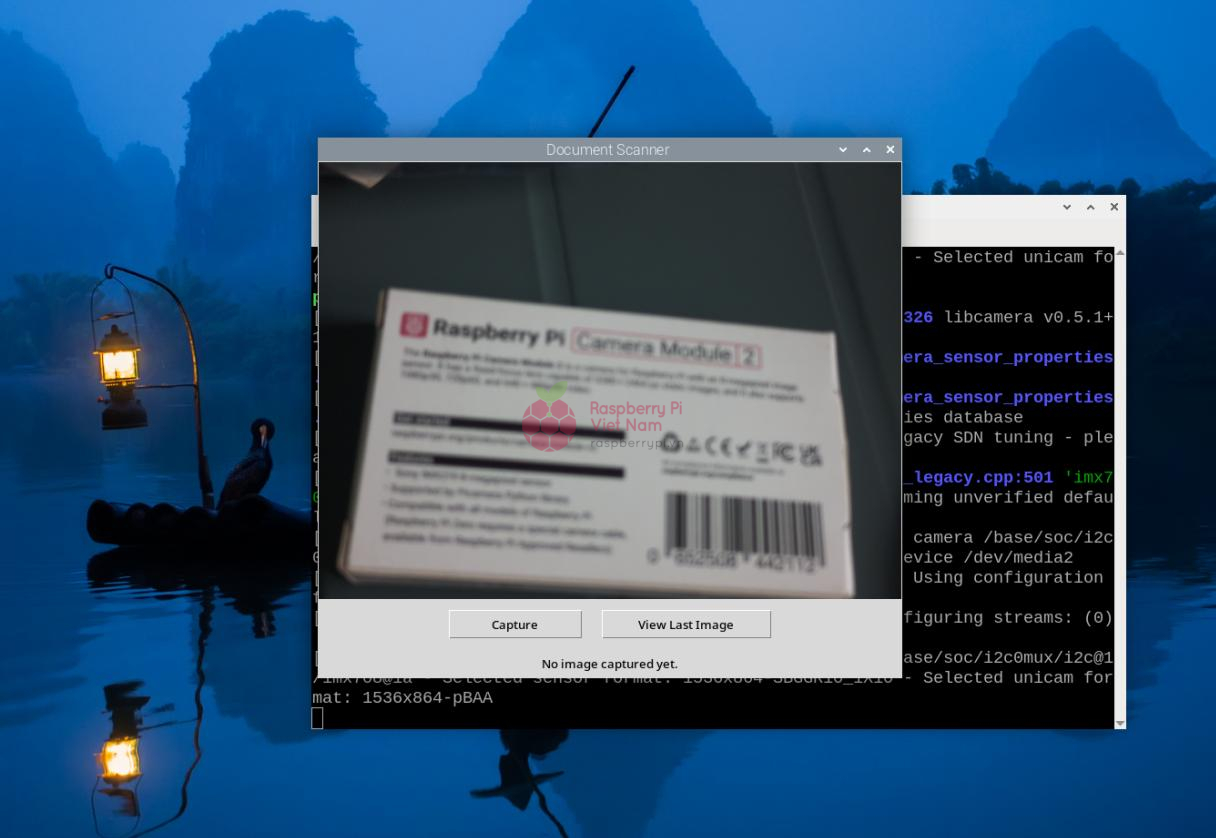
Giao diện người dùng khá là đơn giản với hai nút ấn là “Capture” để chụp ảnh và “View Last Image” để xem ảnh mới chụp gần đây nhất.
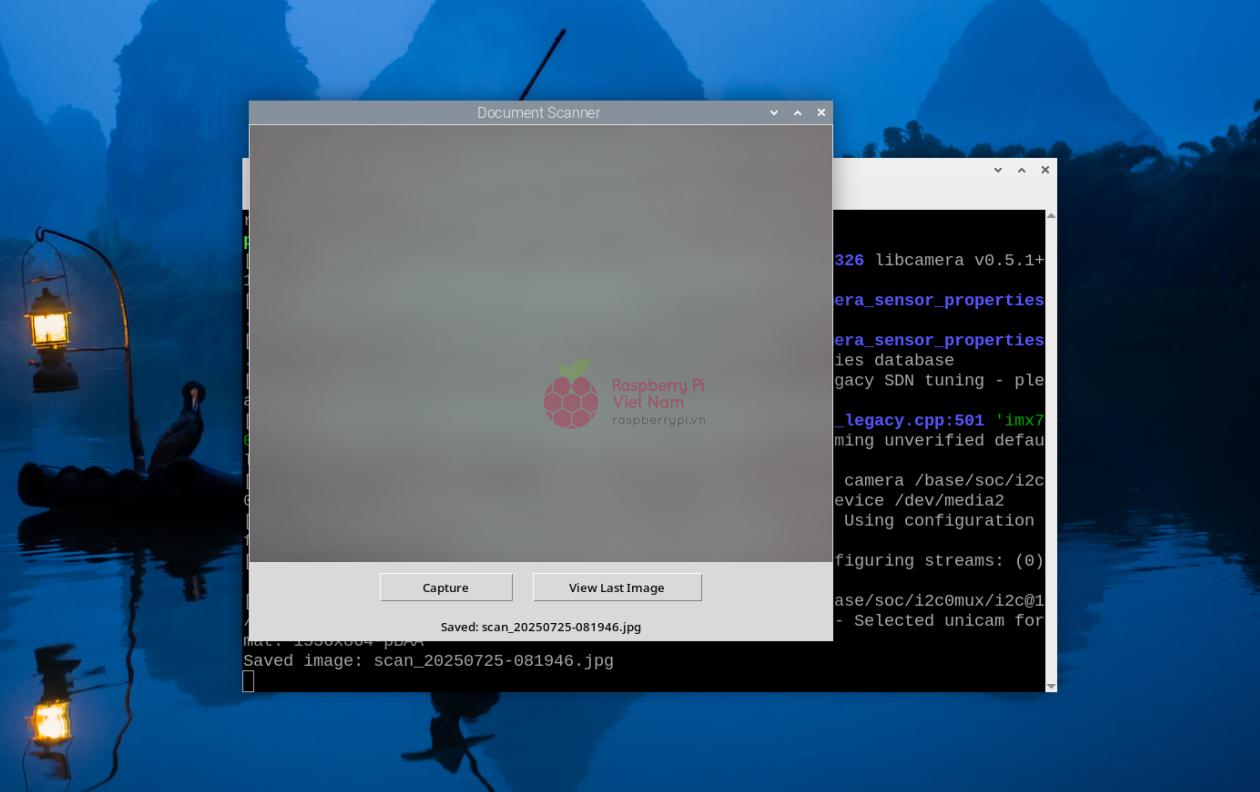
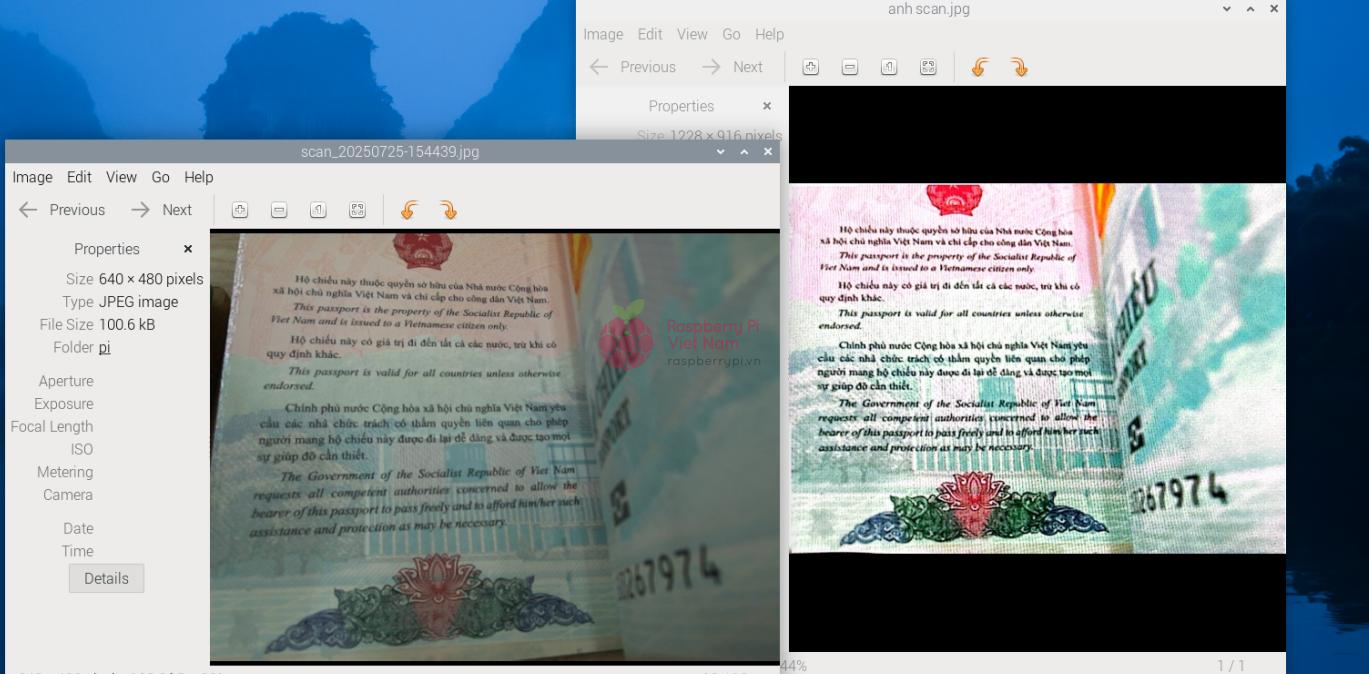
Hình ảnh sau khi chụp sẽ được lưu vào Raspberry Pi
Viết chương trình
Đầu tiên, bạn cần cài đặt đủ thư viện để chạy chương trình:
sudo apt update sudo apt install python3-picamera2 python3-opencv python3-pil -y
Mã Python:
import tkinter as tk
from tkinter import Label, Button
from PIL import Image, ImageTk
import cv2
import time
import numpy as np
import threading
from picamera2 import Picamera2
# ====== Function to auto-crop paper edges from the image ======
def auto_crop_document(image):
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
blur = cv2.GaussianBlur(gray, (5, 5), 0)
edged = cv2.Canny(blur, 75, 200)
# Find contours
contours, _ = cv2.findContours(edged, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
contours = sorted(contours, key=cv2.contourArea, reverse=True)
# Try to find the largest rectangular contour (assumed to be the paper)
for c in contours:
approx = cv2.approxPolyDP(c, 0.02 * cv2.arcLength(c, True), True)
if len(approx) == 4:
pts = approx.reshape(4, 2)
rect = order_points(pts)
return four_point_transform(image, rect)
return image # If not found, return original image
# Order points in consistent top-left, top-right, bottom-right, bottom-left
def order_points(pts):
rect = np.zeros((4, 2), dtype="float32")
s = pts.sum(axis=1)
rect[0], rect[2] = pts[np.argmin(s)], pts[np.argmax(s)]
diff = np.diff(pts, axis=1)
rect[1], rect[3] = pts[np.argmin(diff)], pts[np.argmax(diff)]
return rect
# Warp perspective to get top-down scanned version
def four_point_transform(image, pts):
(tl, tr, br, bl) = pts
width = int(max(np.linalg.norm(br - bl), np.linalg.norm(tr - tl)))
height = int(max(np.linalg.norm(tr - br), np.linalg.norm(tl - bl)))
dst = np.array([[0, 0], [width - 1, 0],
[width - 1, height - 1], [0, height - 1]], dtype="float32")
M = cv2.getPerspectiveTransform(pts, dst)
return cv2.warpPerspective(image, M, (width, height))
# ====== GUI Class ======
class DocumentScannerApp:
def __init__(self, root):
self.root = root
self.root.title("Document Scanner")
self.last_image_path = None
# Live preview label
self.label = Label(root)
self.label.pack()
# Buttons for capture and view
btn_frame = tk.Frame(root)
btn_frame.pack(pady=10)
self.capture_btn = Button(btn_frame, text="Capture", command=self.capture_image_thread, width=15)
self.capture_btn.grid(row=0, column=0, padx=10)
self.show_btn = Button(btn_frame, text="View Last Image", command=self.show_image_thread, width=20)
self.show_btn.grid(row=0, column=1, padx=10)
# Status label
self.status_label = Label(root, text="No image captured yet.")
self.status_label.pack(pady=5)
# Initialize camera
self.picam2 = Picamera2()
self.picam2.preview_configuration.main.size = (640, 480)
self.picam2.preview_configuration.main.format = "RGB888"
self.picam2.configure("preview")
self.picam2.start()
# Start live updating the preview
self.update_preview()
# Handle window close
self.root.protocol("WM_DELETE_WINDOW", self.on_close)
# Continuously update camera preview
def update_preview(self):
try:
frame = self.picam2.capture_array()
rgb = cv2.cvtColor(frame, cv2.COLOR_BGR2RGB)
img = Image.fromarray(rgb)
imgtk = ImageTk.PhotoImage(image=img)
self.label.imgtk = imgtk
self.label.configure(image=imgtk)
except:
pass
self.root.after(30, self.update_preview)
# Start image capture in a separate thread
def capture_image_thread(self):
threading.Thread(target=self.capture_image).start()
# Capture, crop and save image
def capture_image(self):
frame = self.picam2.capture_array()
cropped = auto_crop_document(frame)
timestamp = time.strftime("%Y%m%d-%H%M%S")
path = f"scan_{timestamp}.jpg"
cv2.imwrite(path, cropped)
self.last_image_path = path
self.status_label.config(text=f"Saved: {path}")
print(f"Saved image: {path}")
# Start viewing image in a separate thread
def show_image_thread(self):
threading.Thread(target=self.show_last_image).start()
# Open window to display the last captured image
def show_last_image(self):
if self.last_image_path:
img = cv2.imread(self.last_image_path)
if img is not None:
rgb = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
img_pil = Image.fromarray(rgb)
imgtk = ImageTk.PhotoImage(image=img_pil)
top = tk.Toplevel(self.root)
top.title("Captured Image")
lbl = Label(top, image=imgtk)
lbl.image = imgtk # keep reference
lbl.pack()
else:
print("Could not read image.")
else:
print("No image captured yet.")
# Clean up camera and exit
def on_close(self):
print("Closing application...")
self.picam2.stop()
self.root.destroy()
# ====== Run the app ======
if __name__ == "__main__":
root = tk.Tk()
app = DocumentScannerApp(root)
root.mainloop()
Kết luận
Chỉ với một chiếc Raspberry Pi và camera module, bạn đã có thể tạo ra một máy scan tài liệu nhỏ gọn, tiện dụng và thông minh. Dự án này không chỉ giúp bạn số hóa tài liệu nhanh chóng mà còn mở ra nhiều tiềm năng ứng dụng khác trong giáo dục, văn phòng hay cá nhân.